Chapter 18. Introduction to Classification
This chapter and the following three chapters provide an overview of lidar point cloud classification. This chapterexplains why classifications must occur and the next chapter—Chapter 19. Interactive Classification— introduces classifications, classifying points interactively is demonstrated. Chapter 20. Introducing Geoprocessing Tools for Classification introduces Geoprocessing tools that can be employed to support mass classifications. Chapter 21. Classifying Points Using Geoprocessing Tools will demonstrate more of the Geoprocessing tools.
As a reminder, lidar data is the result of active remote sensing. Short pulses of light are sent out from a transmitter and received back as reflected points of light (called returns). The instrumentation in a lidar sensor calculates the time each pulse takes to reflect and return to the sensor. The time allows the calculation of the distance traveled and ultimately enables the calculation of elevation above mean sea level. The collection of returns is called a point cloud. Points with only elevation values assigned are raw lidar data. Each return (or point in the point cloud) must be classified with a nominal value to be used in analysis or geoprocessing operations.
Depending on the contract with the lidar acquisition firm, the point cloud could be provided to the customer as raw data, data with some classification accomplished (i.e. identification of tree canopy, identification of terrain, identification of man-made structures, etc.), or data with only ground points identified. The point classification varies in each of the lidar tiles downloaded in Locating and Downloading Lidar Data (Chapters 7-9) (Figure 18.1).
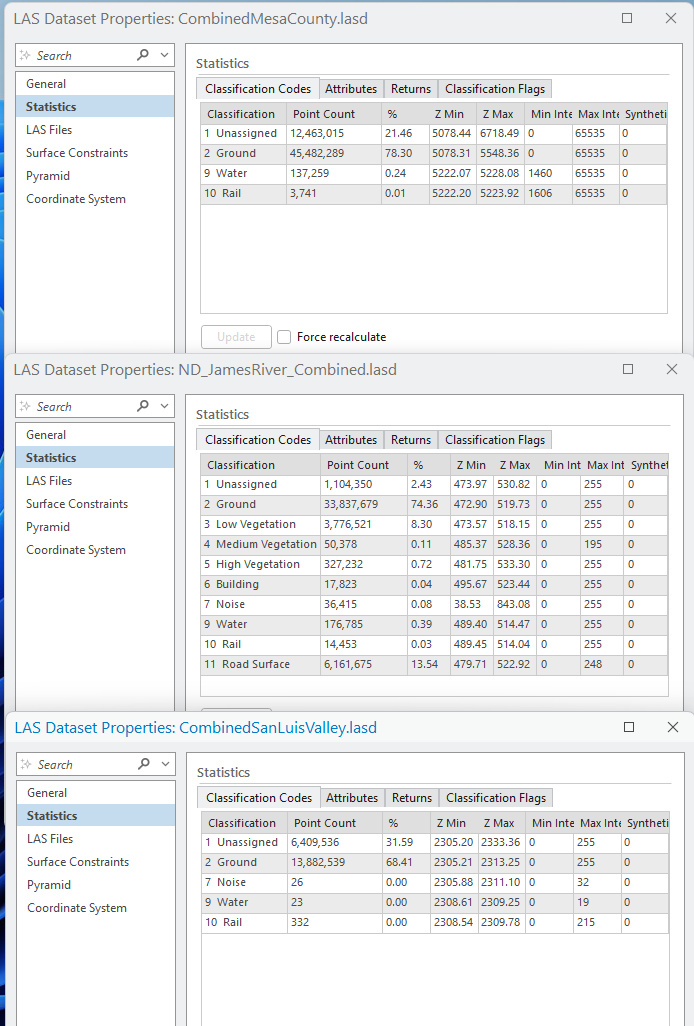
In the three regions used in this book, different numbers of classes are present either because that is all the government entity requested from the vendor, or those classifications are all that the government entity has processed when the data was made available to the public for downloading.
Variation in point classification can also occur if the classification scheme used is not done in accordance with the American Society for Photogrammetry and Remote Sensing (ASPRS) LAS Specifications[1]. These standards are not required by any governmental regulation. Still, they have been adopted by the U.S. Geological Survey (USGS) and lidar data stored by the United States National Map must use these specifications. As a result of the USGS requirement, and to support consistency across jurisdictional boundaries and across different data collection periods and scales, many state, local, and regional government entities, as well as other organizations, are following the ASPRS standards.
The most recent LAS specification update includes the classification codes (Table 1) for assignment of points to specific nominal values[2]. The ASPRS updates LAS classification codes regularly. Thus, please check the ASRPS website at https://www.asprs.org/ before doing any classifications:
| Classification Value | Classification Description |
|
0 |
Never classified |
|
1 |
Unassigned |
|
2 |
Ground |
|
3 |
Low Vegetation |
| 4 | Medium Vegetation |
| 5 | High Vegetation |
| 6 | Building |
| 7 | Low Noise |
| 8 | Reserved |
| 9 | Water |
| 10 | Rail |
| 11 | Road Surface |
| 12 | Reserved |
| 13 | Wire – Guard (Shield) |
| 14 | Wire – Conductor (Phase) |
| 15 | Transmission Tower |
| 16 | Wire-Structure Connector (Insulator) |
| 17 | Bridge Deck |
| 18 | High Noise |
| 19-63 | Reserved |
| 64-255 | User Definable |
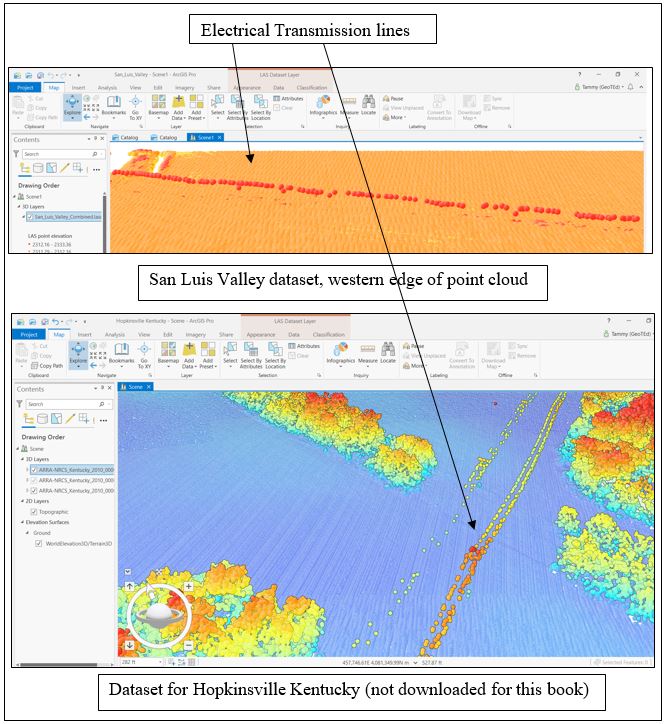
Some of these classification codes are meaningful to specific regions, some are not. For example, codes 13–16 are associated with transmission wires and related equipment. These are overhead wires and can be “picked up” by a lidar acquisition (as an example, see Figure 18.2) but might not be found in every acquisition.
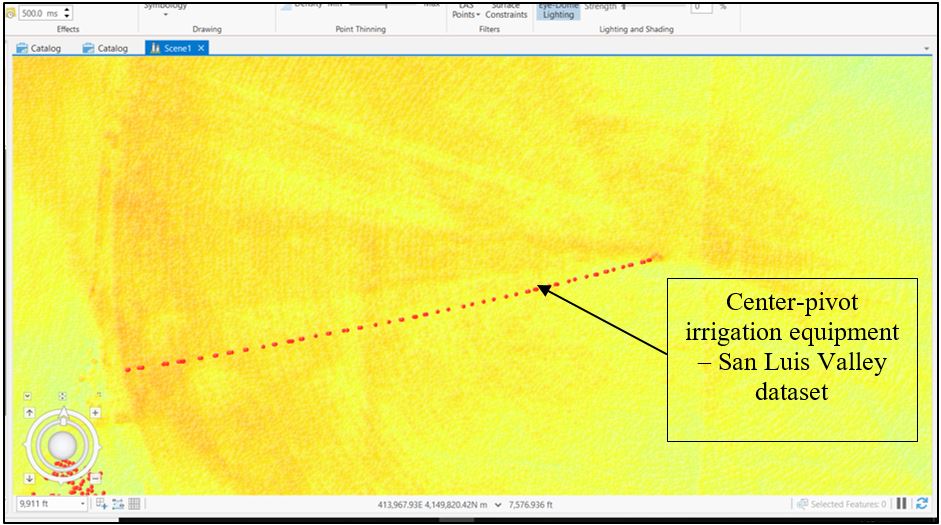
User-definable classification codes (64–255) are a very important part of classification schemes because individual regions are unique, and these also allow flexibility for local, state, and federal governments to apply schemes specific to their region and to support specific application requirements. An example of a unique situation is found in Figure 18.3.
User-defined classification codes cannot be defined in ArcGIS Pro®; they must be identified within the LAS dataset. If the dataset owner has not defined these codes, they cannot be used to classify points[3].
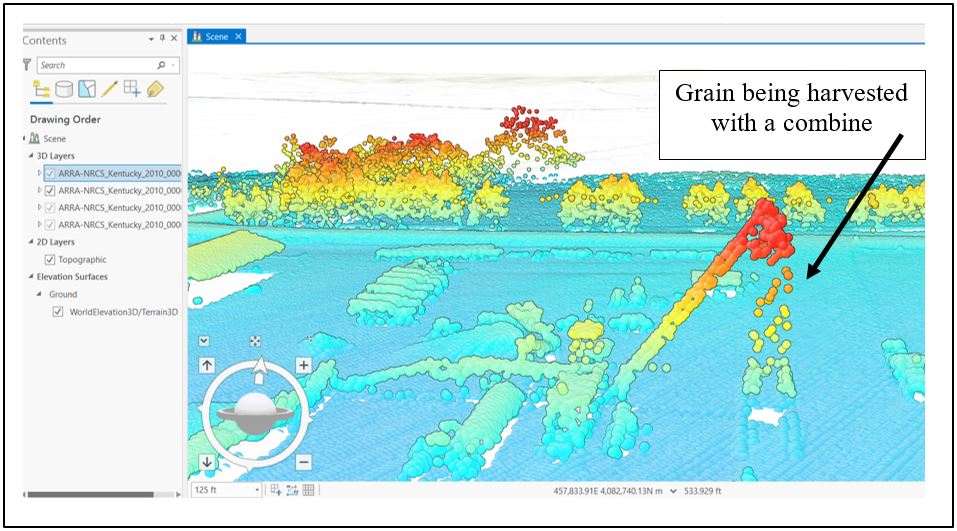
Additionally, the classification of High Noise (18) is important for classifying points. Lidar returns can be acquired from flying birds or when grain is being harvested from a field. Both situations are not essential parts of lidar evaluations because they are events occurring at a single instance or for a very short period (Figure 18.4).
Before attempting any classification, becoming familiar with the area of interest and the lidar point cloud is important. The next chapter will demonstrate how to classify lidar points interactively.
- http://www.asprs.org/wp-content/uploads/2019/03/LAS_1_4_r14.pdf, revised March 2019 ↵
- http://desktop.arcgis.com/en/arcmap/10.3/manage-data/las-dataset/lidar-point-classification.htm ↵
- For more information on using specific classification codes in ArcGIS Pro®, see https://pro.arcgis.com/en/pro-app/help/data/las-dataset/storing-lidar-data.htm . ↵
